
Getting Started - Learn to use the DRIFT library
This Getting Started tutorial will help you quickly set up and start using the library, even if you’re not familiar with the underlying concepts of Invariant Extended Kalman Filtering (InEKF).
For more detailed information on the DRIFT library code, see the core DRIFT documentation.
Finding Code
DRIFT Source code is on Github: https://github.com/UMich-CURLY/drift. Issues can also be opened there.
Library Overview
There are 6 core components that make up the DRIFT library:
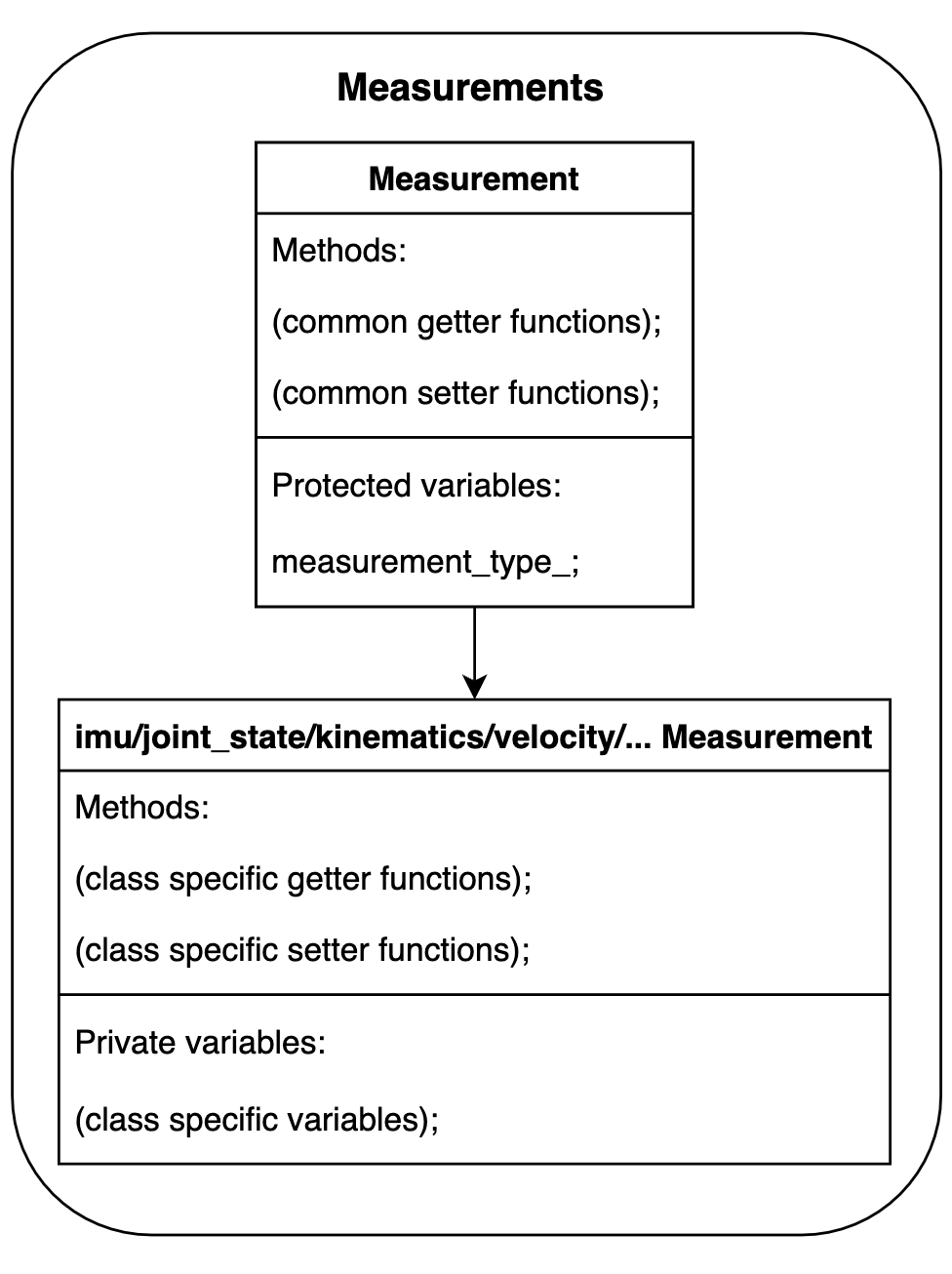
1) Measurements: The Measurements component includes classes to represent different types of sensor data relevant for state estimation. The primary class, Measurement, serves as a base class for specific measurement types, such as ImuMeasurement (for IMU readings) or ContactMeasurement (for legged robot foot contact states). These classes primarily serve as data structures to store time-sequential sensor data in a queue, ready to be processed by the filter. Additionally, the classes posess built-in functions to perform conversions to make data-representation more appropriate for filter input.
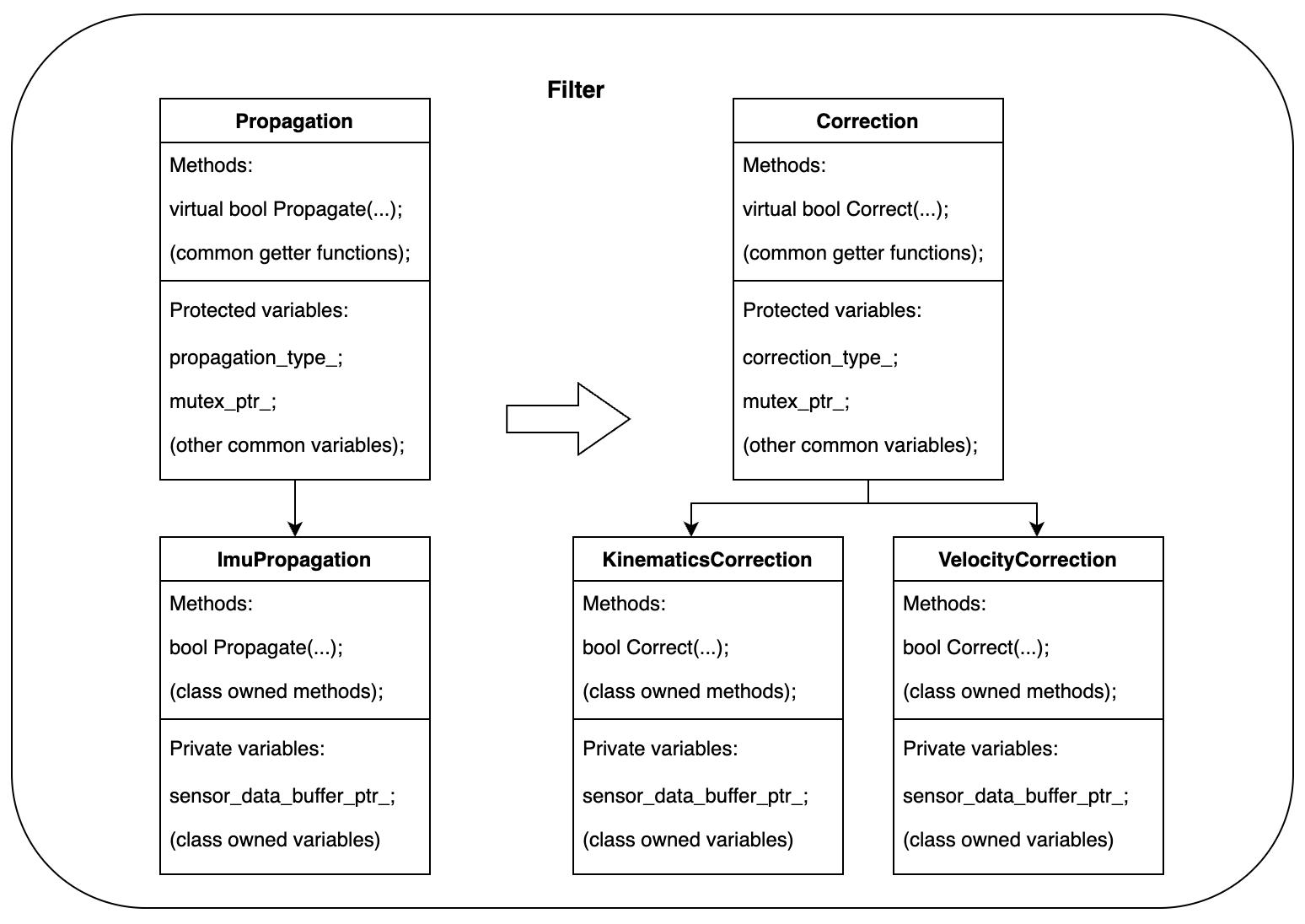
2) Filter: The Filter component is the core of the library, where different filtering algorithms are be implemented. For now we provide implementation for the Invariant Extended Kalman Filter (InEKF). In the future, we plan to introduce different filters to DRIFT. This component takes the robot’s current state and incoming measurements to predict and correct the estimates of the robot’s position, orientation, and velocity.
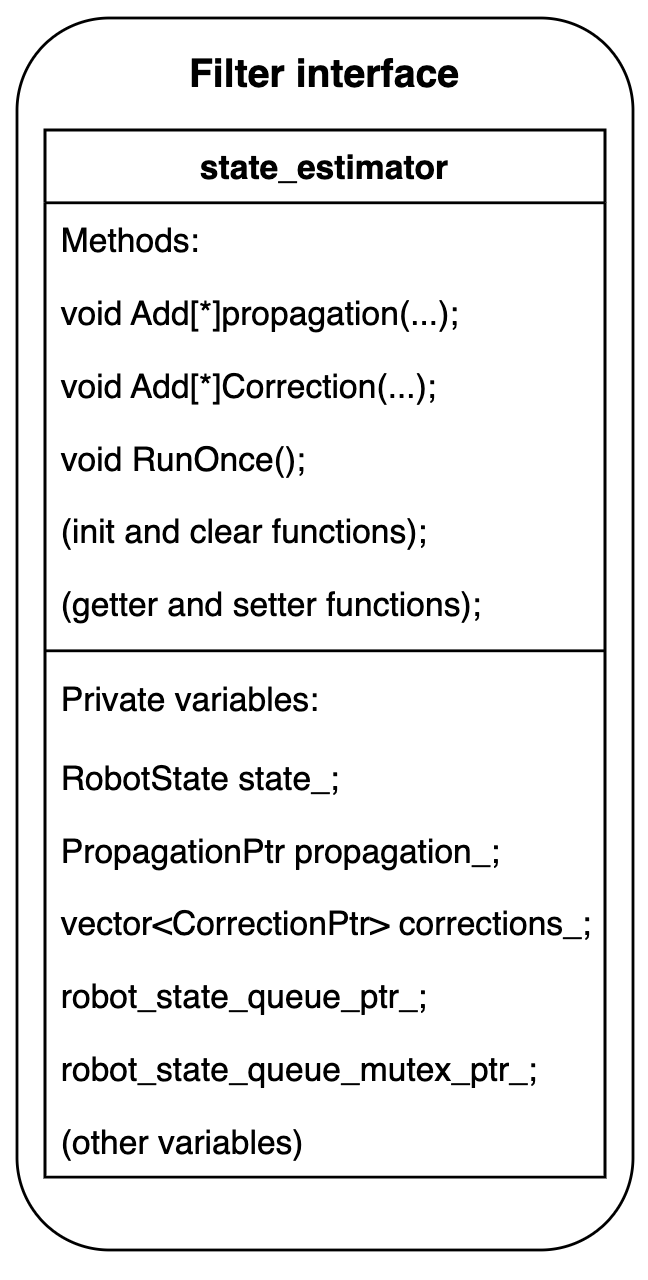
3) Filter Interface: The Filter Interface is designed to simplify the integration of the filter into your project. It provides an abstraction layer between users and the underlying filter implementation, making it easier to use the library without in-depth knowledge of the filter.
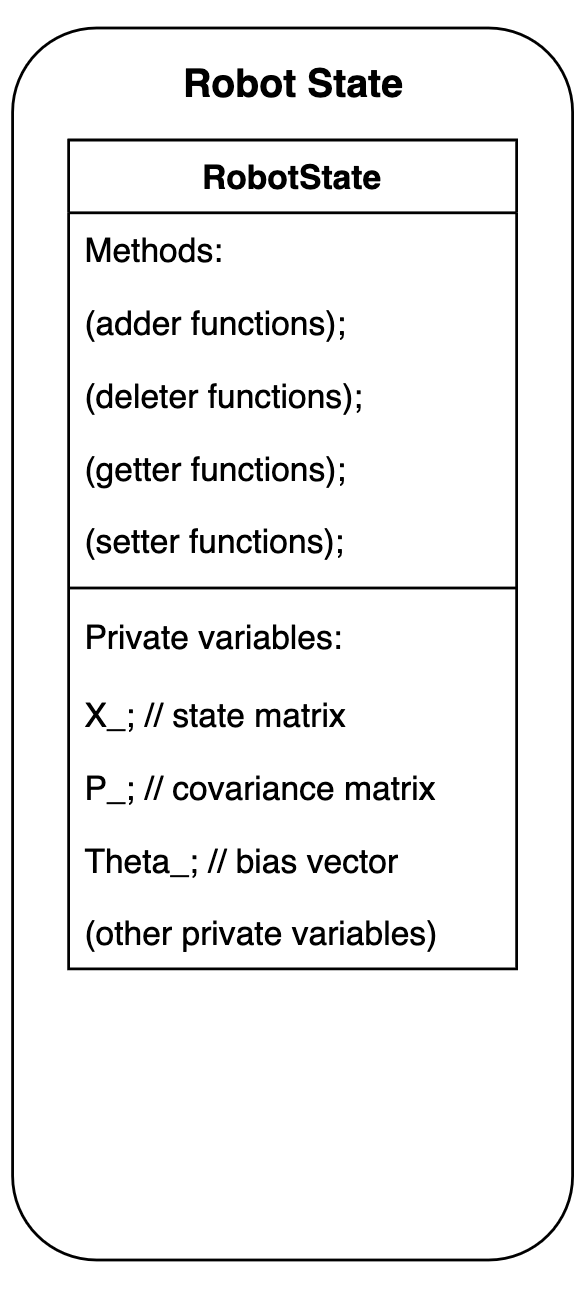
4) Robot State: The Robot State component holds information about the current state of the robot, including position, velocity, orientation, state covariance, and sensor biases. This state is used as input for the filter during the prediction step and gets updated with refined estimates after processing the incoming measurements.
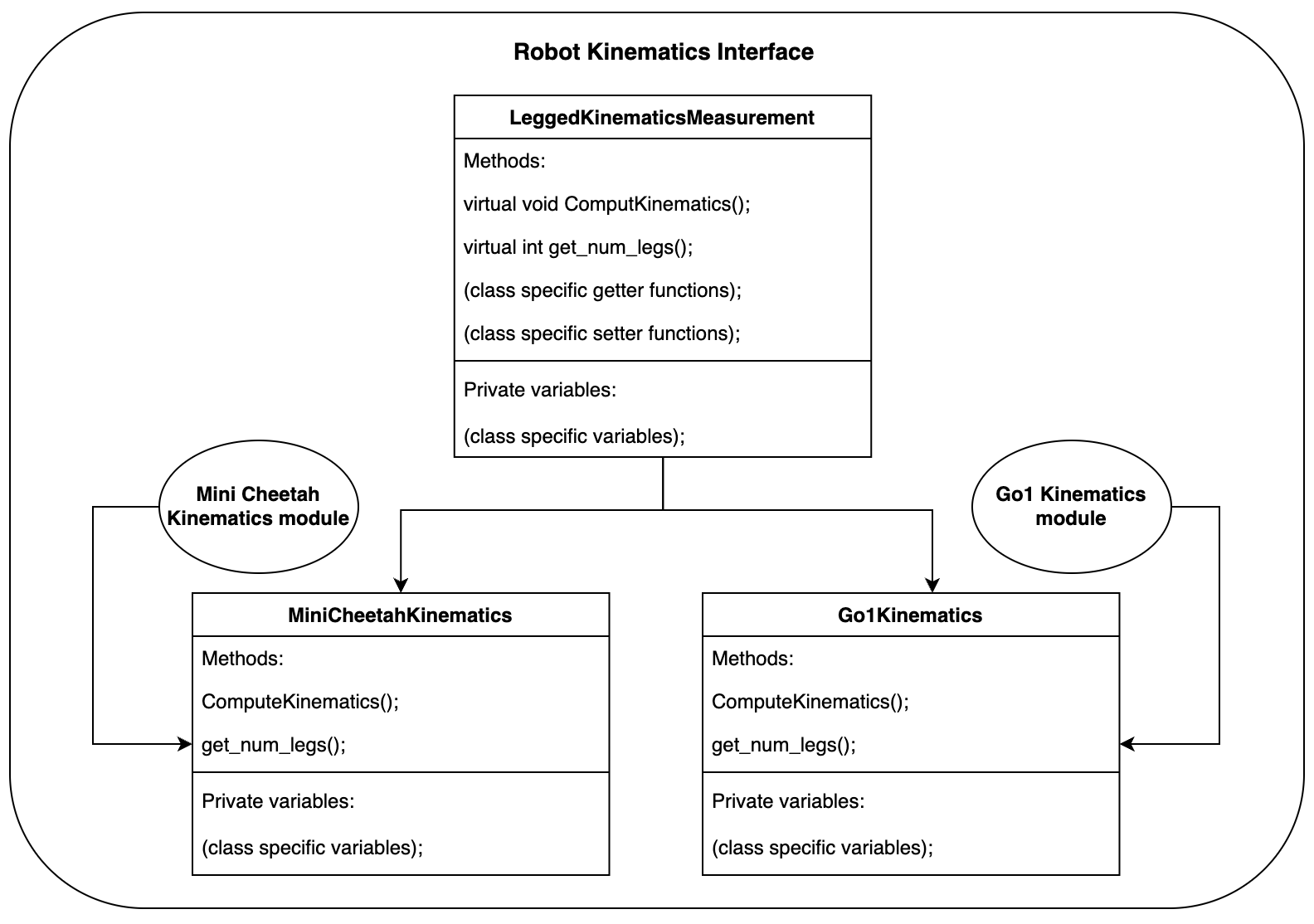
5) Robot Kinematics Interface: This component is only necessary for legged robots and stores the kinematic definition of a particular robot, such as a quadrupedal configuration. The Robot Kinematics Interface is responsible for computing the body-frame position, which is combined with foot contact information and used in the filter’s correction step. DRIFT provides example implementations for the MIT MiniCheetah and Unitree Go1 quadrupedal platforms
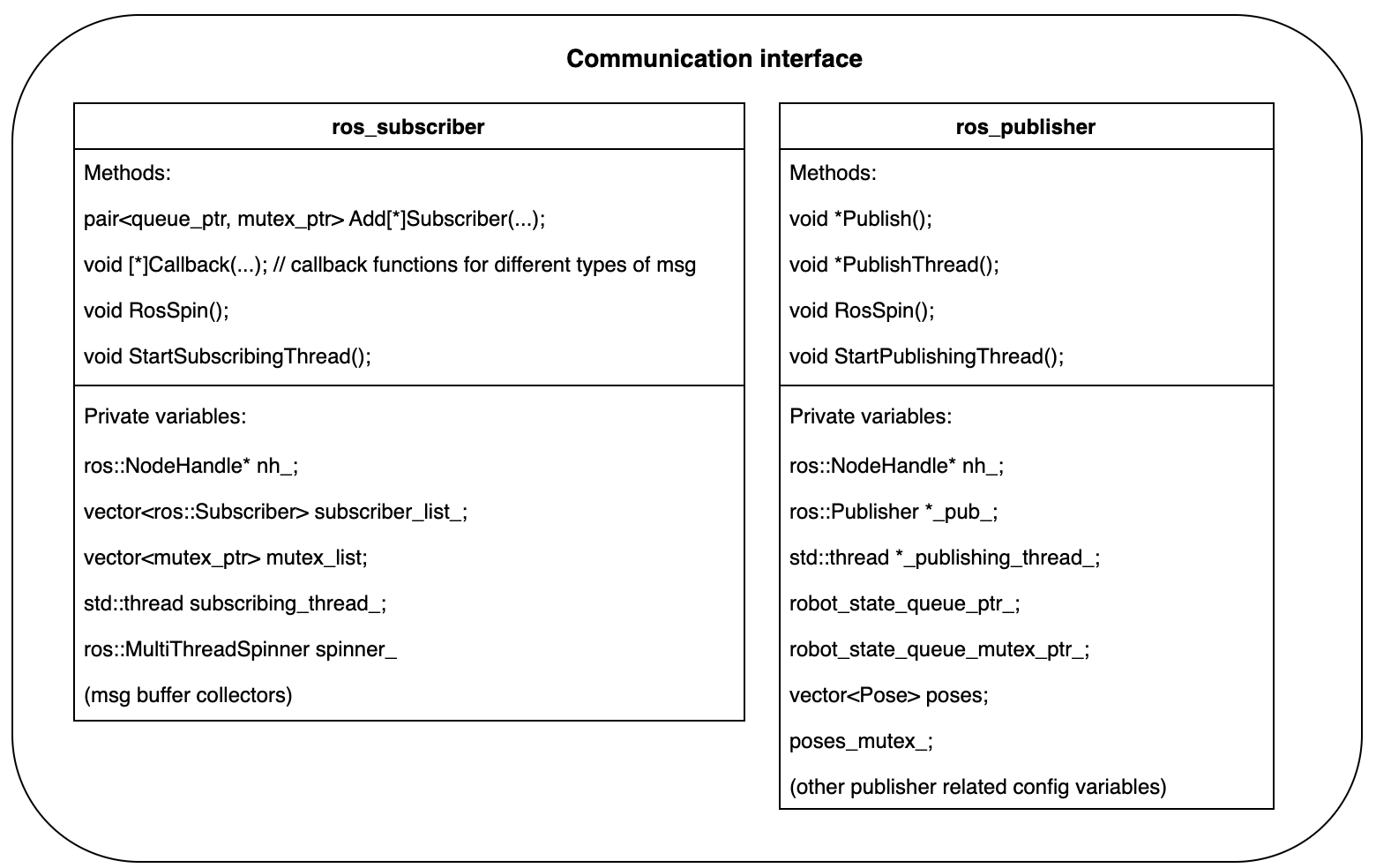
6) Communication Interface: The Communication Interface serves as the outermost wrapper, managing communication between the library and external sources or sinks. This component ensures that the library can easily receive measurement data streams and transmit the updated state estimates for use elsewhere in real-time. As a standalone library, DRIFT can be directly included in your project for implementing a custom communication method (over UDP for example). Additionally, we provide ROS interfaces for easy access. In the future, we plan to expand support for both Lightweight Communications and Marshalling (LCM) and ROS 2 interfaces.
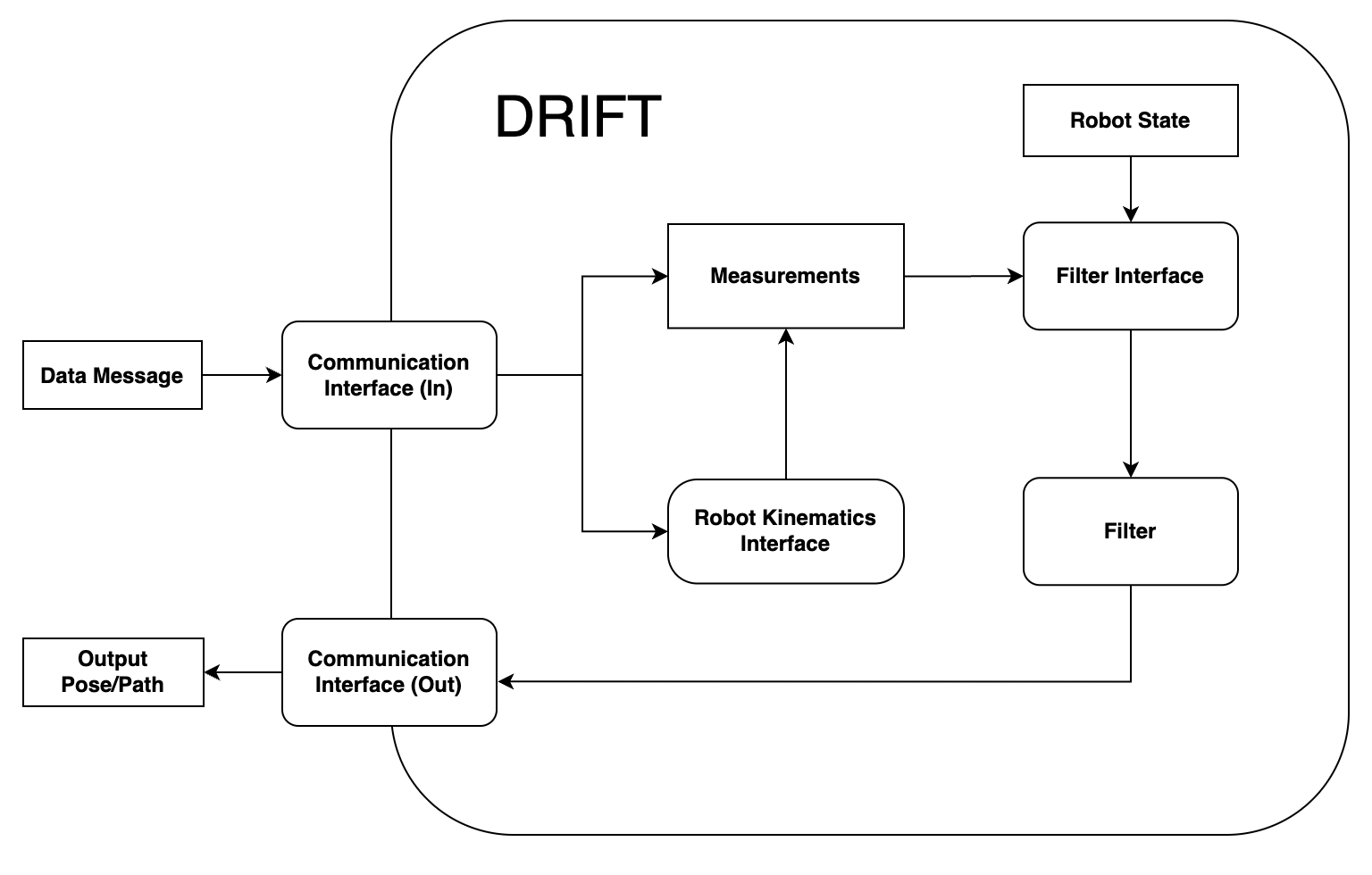
Below is DRIFT’s flow structure of data input and robot state information output.
Core DRIFT Tutorials
1) Installing and Configuring DRIFT
This tutorial walks you through installation and setup of DRIFT.
Examples
Provide examples or use cases to demonstrate the library’s functionality in real-world scenarios.
Include sample code and explanations for each example to help users see the library in action and better understand how to apply it to their own projects.
Troubleshooting and FAQs
Can possibly make this a separate page linked to the main site.
List common issues or questions that users may encounter while working with the library, along with their solutions or explanations.
This section can be updated over time as you receive user feedback and questions.
Further reading and resources
TODO: Provide links to relevant documentation, papers, or other resources for users who want to learn more about InEKF or dive deeper into the library’s capabilities.